Home GCX Home
Differential Airmass
Radu Corlan January
10, 2005
The difference in airmass between two points in a frame depends on the
angular separation between them, the airmass of the frame and the relative
orientation of the two points. The difference will be greatest when the two
point lie on top of each other (i.e. they have the same azimuth); this is
the worst case for differential airmass. This worst-case difference is plotted
for various separations below:
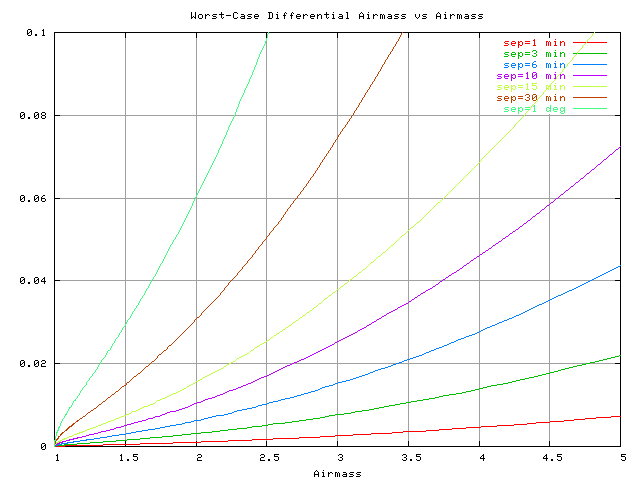
Using this graph, it is easy to determine if and when differential extinction
can be neglected. For a given separation and airmass, find the differential
airmass value from the graph and multiply it with the extinction coefficient.
The resulting value is an upper bound to the magnitude of the differential
extinction term. For the purpose of determining it, it is not necessary
to use a precise extinction coefficient value; a typical value is enough
(like 0.3-0.4 for the V band). If we want to make sure the differential
extinction terms are below 0.003 for instance, it is reasonable to place
a limit of 0.01 for the differential airmass.
The above graph was generated with gnuplot, using this command file.